
|
|||
|---|---|---|---|
|
|
Sistema CAM e biomecânica geral no equipamento flexor de joelhos sentado El sistema CAM y la biomecánica general en el equipamiento flexor de rodillas sentado CAM System and general biomechanics at seated leg curl equipment |
|
|
|
Professor de Educação Física Licenciado pelo Centro Universitário Claretiano Batatais, Estado de São Paulo |
Roberto Guimarães Radaelli biomecanica@professor.sp.gov.br (Brasil) |
|
|
|
Resumo A flexão do joelho sentado no aparelho é um exercício de deslocamento monoarticular, projetado para trabalhar os músculos posteriores da coxa. Esta versão sentada é uma ótima alternativa para as pessoas com problemas nas costas, pressão arterial alta, pessoas obesas, grávidas, ou para pessoas que possuam outras dificuldades com o uso dos equipamentos em que se deita de bruços para praticar o exercício. No entanto, muitos equipamentos deste tipo produzem uma amplitude de movimento reduzida, por erro no tamanho do apoio do fêmur e posição do eixo da polia. Quanto à resistência, o equipamento deve fornecer uma resistência baixa no início do movimento, máxima quando o joelho estiver em 90º de flexão e média no final do movimento. O assento deve estar posicionado de 100 a 110 graus em relação a almofada que apóia as costas para que se elimine insuficiências musculares dos músculos reto femoral e ísquio-surais. Unitermos: Equipamentos de musculação. Sistema CAM. Polia CAM. Resistência dinâmica variada. Força muscular. Curva de força.
Abstract The Seated Hamstring Flexion is a single joint motion exercise designed to target the hamstring. This seated version of hamstring flexion is a great alternative for people who have certain back problems, high blood pressure concerns, obese people, pregnant, or have other difficulties with using the prone type of machines for this exercise. Along with its advantages come some disadvantages, such as a decrease range of motion for project error (pulley position and seat very long). Correct resistance: Reduction resistance at begin of the range of motion, maximum resistance at 90º of the knee flexion and medium resistance at end of range of motion. Back pad is angle 100º to 110º from seat bottom to relieve hamstring and rectus femoris tension. Keywords: Strength training equipments. CAM system. CAM pulley. Dynamic variable resistance. Muscle force. Strength curve.
|
|||
|
|
EFDeportes.com, Revista Digital. Buenos Aires, Año 15, Nº 152, Enero de 2011. http://www.efdeportes.com/ |
|
|
1 / 1
1. Introdução
O objetivo deste estudo é orientar empresas fabricantes de equipamentos em como produzir equipamentos com melhor qualidade, bem como compartilhar este conhecimento com profissionais de educação física e proprietários de academias para que possam verificar a qualidade de suas máquinas e também saber como melhor utilizar este tipo de equipamento.
Tesch (1999) analisou este exercício e constatou através da análise por ressonância magnética que os músculos, grácil, sartório e semitendinoso mostram grande envolvimento neste exercício. Surpreendentemente, o bíceps femoral não.
Primary Movers: Gracilis, sartorius and semitendinosus, Tesch (1999).
Este equipamento é ideal para grávidas, hipertensos e pessoas obesas.
Observação: Software de desenho usado não apresenta precisão, portanto deve-se levar em conta o que a parte escrita menciona e usar as ilustrações somente como auxílio para uma melhor compreensão.
2. Discussão
Neste tipo de equipamento a almofada das costas deve ser disposta em um ângulo de 100º a 110º em relação ao assento para promover uma ligeira extensão do quadril que eliminará insuficiências musculares dos músculos ísquio-surais e reto femoral.
Back pad is angle 100º to 110º from seat bottom to relieve hamstring and rectus femoris tension.
É importante que a almofada acoplada ao suporte que fixa o joelho impedindo que ele se desloque superiormente durante a execução do exercício, possua regulagens eficientes para todos os tamanhos de usuários. O que verificamos em algumas empresas é que para alguns usuários a regulagem do equipamento é totalmente ineficiente. Se o usuário coloca a regulagem no nº 2 o joelho fica “frouxo” demais, e se coloca a regulagem no nº 3 os joelhos ficam apertados demais tornando o exercício desconfortável.
Tanto no equipamento flexor sentado quanto no extensor é de extrema importância que durante toda a amplitude articular segura, o equipamento permita através de um projeto bem feito, que o usuário permaneça com o centro da articulação do joelho (eixo) alinhado ao eixo da polia, conforme ilustra a figura 1.
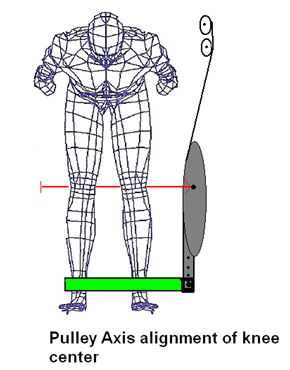
Figura 1. Alinhamento correto do centro da articulação do joelho e o eixo da polia do equipamento
Important axis alignment of knee center.
O assento do Banco flexor tem que ser menor (quanto ao comprimento) do que o assento do banco extensor:
O fêmur (durante e extensão do joelho), no equipamento extensor sentado, necessita de um apoio maior durante execução de exercícios para apoiar a parte distal do fêmur, porque no momento em que o executante contrai o quadríceps, a tendência da extremidade distal do fêmur é de deslocamento inferior; O fêmur pressiona o apoio, causando uma força de reação de igual magnitude no sentido contrário.
Porém, quando o assunto é flexão do joelho (sentado), o apoio do fêmur deve ser menor, pois quando o executante contrai os músculos isquiosurais, a tendência da extremidade distal do fêmur é um deslocamento superior, e durante toda a amplitude articular o principal para uma boa estabilização da articulação é que o centro da articulação do joelho permaneça alinhado com o eixo da polia do equipamento, e que também a amplitude do movimento não seja limitada pelo equipamento. Se o apoio do fêmur (no equipamento flexor sentado) for grande, (igual ao do equipamento extensor), para manter o eixo do joelho alinhado como eixo da polia o executante não conseguirá flexionar corretamente o joelho, limitando assim a amplitude de movimento. Se, porém, o executante flexionar totalmente o joelho, a fim de aumentar a amplitude do movimento, o fêmur se deslocará para frente do eixo do equipamento, perdendo assim o tão precioso alinhamento do centro do joelho com o eixo da polia e desestabilizará o movimento, pois com já dito, a articulação do joelho inicialmente se deslocará à frente do eixo do equipamento e depois fará o possível para voltar a alinhar-se com eixo da polia promovendo neste momento desestabilidade articular durante o movimento.
Desta forma é necessário que o tamanho do apoio do fêmur no equipamento flexor do joelho sentado seja menor que o apoio do fêmur no equipamento extensor do joelho.
Note abaixo no desenho a diferença. Se o apoio do fêmur no equipamento extensor mede em torno de 55 cm, o apoio do fêmur no equipamento flexor sentado deve ser de aproximadamente 40 cm.
Obs.: O eixo da polia do banco flexor permanece praticamente na mesma posição do eixo do extensor de joelho. O assento é que diminui o comprimento, e durante todo o percurso de deslocamento o eixo do joelho (centro) deve permanecer alinhado com o eixo da polia do equipamento, tanto no extensor quanto no banco flexor.
A imagem seguinte é apenas ilustrativa para explicar este ponto de vista biomecânico. Para um correto posicionamento do eixo do equipamento é necessário um cálculo mais apurado. Talvez colocar o eixo do flexor um pouco mais atrás do que como está na figura (porém sempre o eixo do flexor terá uma maior distância do assento do que o eixo do equipamento extensor).
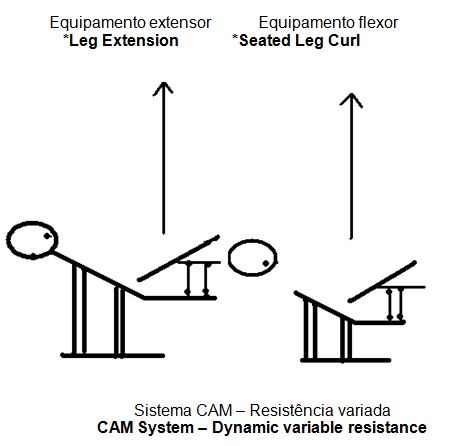
O sistema CAM nasceu a partir da descoberta que músculos esqueléticos variam a capacidade de produzir força conforme se altera a amplitude articular de movimento. Ora, se os músculos variam a capacidade de produzir força, para um melhor recrutamento de unidades motoras e também para que se evite leões musculares durante o exercício, é preciso que os equipamentos também variem a resistência imposta aos músculos da mesma forma. Um equipamento com um correto sistema CAM aumenta a resistência no ângulo articular onde o grupo muscular ou músculo específico consegue produzir mais força e obviamente no ângulo articular em que o grupo muscular produz uma menor quantidade de força, diminui a resistência. Quando você altera o raio da polia, você altera a resistência proporcionada pelo equipamento em questão.
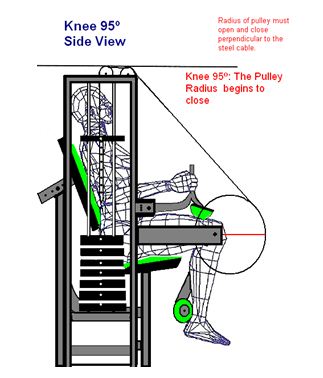
Lembrando que quanto mais perto estiver o cabo, do eixo da polia, menor será a resistência, e quanto mais longe estiver o cabo, do eixo da polia maior será a resistência, sempre perpendicular ao cabo de aço.
Remember: The pulley radius must open and close perpendicular to the steel cable.
Curva de potência em forma de sino dos músculos ísquio-surais:
The Bell Shape strength curve of hamstring muscles:
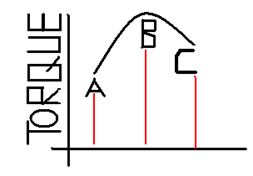
A. Begin of the range of motion
B. 90º of the knee flexion
C. End of range of motion
Correlação entre a curva de potência dos músculos e o aumento ou diminuição no raio da polia do equipamento:
Em Carpenter (2005), verificamos “que os músculos flexores do joelho, produzem maior força numa flexão de 90º”.
According to Carpenter (2005), the hamstring muscles produce more strength at 90º of knee flexion.
Obviamente, se os músculos envolvidos no exercício produzem maior quantidade de força à 90º de flexão do joelho, neste ângulo articular é onde um correto equipamento deve apresentar um maior raio da polia (perpendicular ao cabo de aço).
Para variar a resistência corretamente pode-se usar dois tipos de polias, polias irregulares ou polias redondas com eixo excêntrico (eixo fora de centro). Não importa o tipo de polia, o que importa é que o raio destas polias abra e feche nos ângulos articulares certos, conforme ilustrações seguintes. A polia correta no equipamento flexor sentado apresenta uma curva de resistência do tipo “Bell Shape” ou, “Forma de Sino”. Neste tipo de curva o equipamento fornece uma resistência baixa no início do movimento com aumento progressivo até, geralmente, a metade da amplitude articular, onde a resistência é máxima e conforme o movimento progride e passa a metade da amplitude articular diminui novamente a resistência regressivamente até o final do movimento. Este tipo de curva de resistência serve para todos os músculos, que como os flexores do joelho possuem uma maior capacidade de produzir força aproximadamente na metade da amplitude articular.
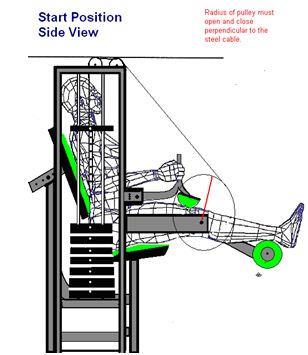
O ponto A na curva de potência apresentada acima representa o início do exercício (figura 2), onde os músculos isquio-surais (ISQS) têm a menor capacidade de produção de torque de todo percurso de deslocamento neste exercício. Se for o caso de se utilizar sistema de polia para gerar a resistência ao grupo muscular, neste ângulo inicial de trabalho, a resistência deve ser a mais baixa levando em conta toda a amplitude articular. Desta forma neste ângulo o raio da polia deve estar bem fechado, ou seja, o cabo de aço deve estar o mais perto possível ao eixo da polia.
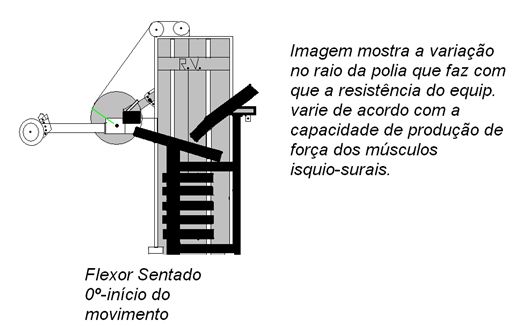
Figura 2 (acima). Repare que o raio da polia (perpendicular ao cabo de aço) está mais fechado neste começo de exercício.
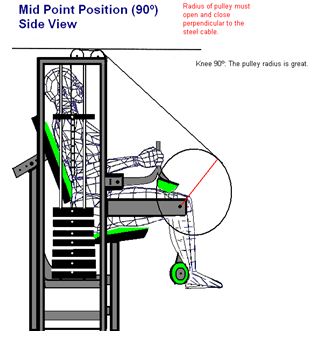
O ponto B na curva de potência apresentada acima representa quando o joelho chega à posição de noventa graus (figura 3), e neste ângulo é a posição em que o grupo muscular (ISQS) tem a maior capacidade de produção de força levando em conta toda a amplitude articular. Se também for o caso de gerar resistência com sistema de polia, neste ângulo, é onde o raio da polia deve estar o mais aberto quanto possível para gerar o maior torque resistivo possível, igualando desta forma a quantidade de resistência oferecida pelo equipamento à capacidade de produção de força dos músculos ísquio-surais.
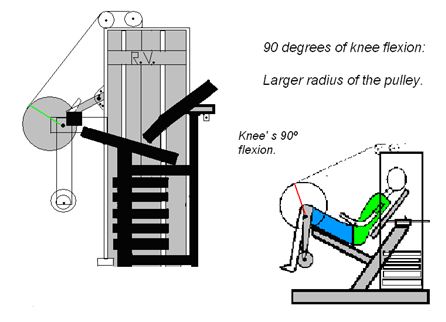
Figura 3 (acima). Joelho a 90º de flexão e por tanto equipamento apresenta o maior raio da polia (perpendicular ao cabo de aço).
Já o ponto C na curva de potência apresentada, representa o final do movimento (figura 4) e neste ângulo articular a capacidade de produção de força do grupo muscular (ISQS) diminui com relação a noventa graus de flexão do joelho, porém ainda neste ângulo final de trabalho os músculos isquiotibiais têm maior capacidade de produção de força do que no início do movimento. Neste sentido se também for se utilizar polia para variar a resistência, o raio da polia deve estar maior que no início do movimento, porém menor que a noventa graus do joelho, conforme ilustração seguinte.
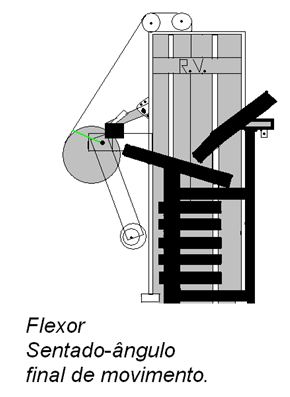
Figura 4 (acima)
É preciso lembrar que a maior resistência do equipamento ocorrerá quando o maior raio da polia estiver exatamente perpendicular ao cabo de aço, como na segunda imagem, logo abaixo.
Remember: The pulley radius must open and close perpendicular to the steel cable.
3. Conclusão
Concluo que apesar do bíceps femoral não participar do exercício, como se esperava, neste equipamento (Tesch, 1999), sem dúvidas, este tipo de exercício proporciona um bom complemento no treinamento dos músculos isquio-surais, desde que sua biomecânica e ergonomia estejam acertadas.
A razão de alguns usuários não se adaptarem ou se sentirem desconfortáveis neste tipo de equipamento é sem dúvida culpa de uma incorreta biomecânica, cito, resistência promovida pelo equipamento incorreta que faz com que os músculos participantes do exercício entrem em uma grande insuficiência durante a amplitude de movimento, principalmente em equipamento de algumas empresas que utilizam polias ascendentes, e também em equipamentos que empresas limitam a amplitude de movimento em demasia.
Para que o equipamento seja eficiente quanto à biomecânica é necessário que todos os pontos anteriormente citados sejam seguidos.
Referências
-
AABERG, E. Bio-Mechanically Correct. Dallas: Realístic, 1996.
-
AQUINO, C.F.; FREIRE, M.T.F.; FONSECA, S.T. Análise da confiabilidade de um método de mensuração do ângulo de pico de torque ativo dos isquiosurais. Revista Brasileira de Fisioterapia, v. 11, p. 169-175, 2007.
-
ARIEL, G. Variable Resistance vs. Standard Resistance Training, Scholastic Coach 46 (5), DEC: 1976, 68-69; 74.
-
CAMPOS, M. A. Biomecânica da Musculação. Rio de janeiro: Sprint, 2000.
-
CAMPOS, M. A. Exercícios Abdominais: Uma abordagem prática e científica. Rio de janeiro: Sprint, 2002.
-
CARPENTER, C. S. Biomecânica. Rio de Janeiro: Sprint, 2005.
-
ENOKA, M. R. Neuromechanical Basis of kinesiology. 2nd ed. Champaign, IL. Human Kinetics. 1994.
-
MIRANDA, E. Bases de Anatomia e Cinesiologia. Rio de Janeiro: 6º edição: Sprint, 2006.
-
NAUTILUS’S CATALOGUE. Features. CAM-Tecnology. 15 pg. Switzerland, 2003.
-
OKUNO, E; FRATIN, L. Desvendando a física do corpo humano: Biomecânica. Barueri, SP: Manole, 2003.
-
RADAELLI, R. G. A importância do fuso muscular para o profissional de educação física quanto ao ganho de flexibilidade. 14 p. - Graduação, 1998.
-
RADAELLI, R. G. Ineficácia de exercícios abdominais realizados com a coluna. EFDeportes.com, Revista Digital. Buenos Aires, v. 123, p. 1/1-1, 2008. http://www.efdeportes.com/efd123/exercicios-abdominais.htm
-
RADAELLI, R. G. O Sistema CAM. Disponível em: http://paulosena.com/2009/02/09/o-sistema-cam/
-
STOPPANI, J. Encyclopedia of Muscle & Strength. Human Kinetics, Champaign, IL. 2005.
-
TESCH, PER A. Target Bodybuilding: Precision Lifting for More Mass and Greater Definition. Champaign: Human Kinetics, 1999.
-
THOMPSON, W. R., BALDWIN, K. E., PIRE, N. I. ACSM’s Resources for the Personal Trainer, 2nd Edition, Lippincott Williams and Wilkins, 2007.
-
WALLACE B, WINCHESTER J, MCGUIGAN M. Effects of elastic bands on force and power characteristics during the back squat exercise. Journal of strength and conditioning research, 20 (2): 268-272, 2006.
-
YESSIS, M. Kinesiology of exercise: A safe and Effective way to Improve Athletic Performance. 5. ed. Indianapolis: Master Press, 1994.
Outros artigos em Portugués
| |

Búsqueda personalizada
|
|---|---|
|
EFDeportes.com, Revista
Digital · Año 15 · N° 152 | Buenos Aires,
Enero de 2011 |
|